
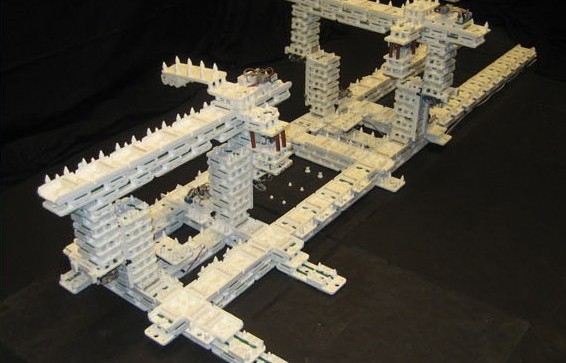
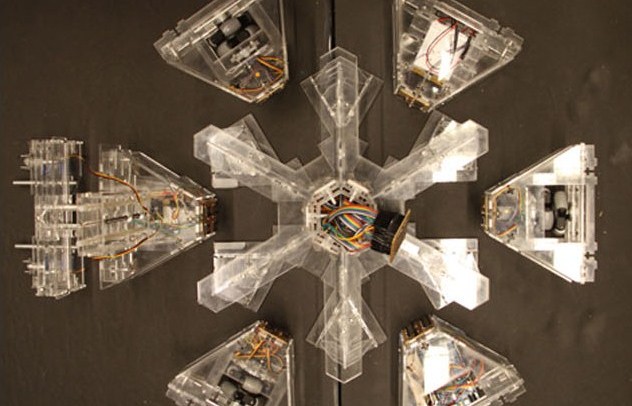
The Robot and Protein Kinematics (RPK) Laboratory is involved in research in computational structural biology (in particular, computational mechanics of large proteins), conformational statistics of biological macromolecules, developed theory for ‘hyper- redundant’ (snakelike) robot motion planning, hyper-redundant robotic manipulator arms, modular self-reconfigurable robots, applied mathematics (applications of group theory in engineering), self-replicating robotic systems.
The RPK Laboratory is directed by Prof. Gregory S. Chirikjian, and is part of the Laboratory for Computational Sensing and Robotics (LCSR) at the Johns Hopkins University.